

接近传感器
定义:接近传感器又称接近开关,能以非接触方式检测到物体的接近和附近物体的有无,是代替限位开关等接触式检测方式,以无需接触检测对象进行检测为目的的传感器的总称。
分类:根据检测原理和被测物体的不同,接近传感器主要分为电感式、静电容式两大类。
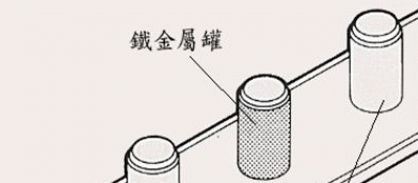
接近传感器工作原理——电感式

检测对象:具备产生感应电流的能力,否则不能被检测出来;
检测距离:产生感应电流能力越强,检测距离越长。
金属磁性强弱不一,利用接近传感器对不同金属的检测距离的不同,把生产线上不同的金属罐分类。
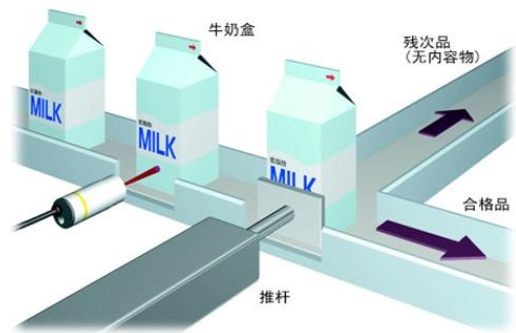
接近传感器应用——电容式
由于产品中具有不同的静电容量,利用静电容量型接近传感器可以检测出纸盒包装内有无饮品。
接近传感器特点
1>.由于能以非接触方式进行检测,所以不会磨损和损伤
被测物体
2>.由于采用无接点输出方式,因此寿命延长
3>.与接触式开关相比,可实现高速响应
4>.不受检测物体颜色的影响
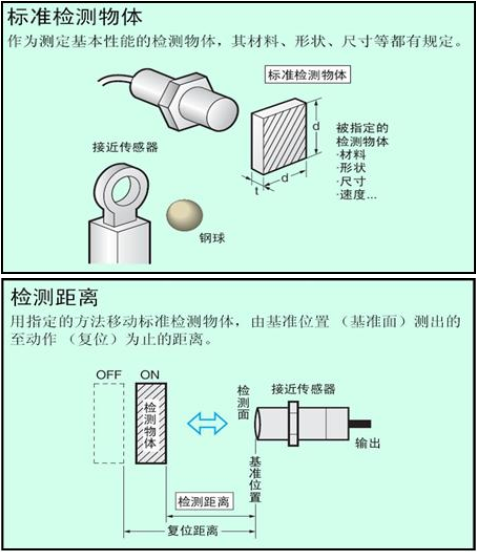
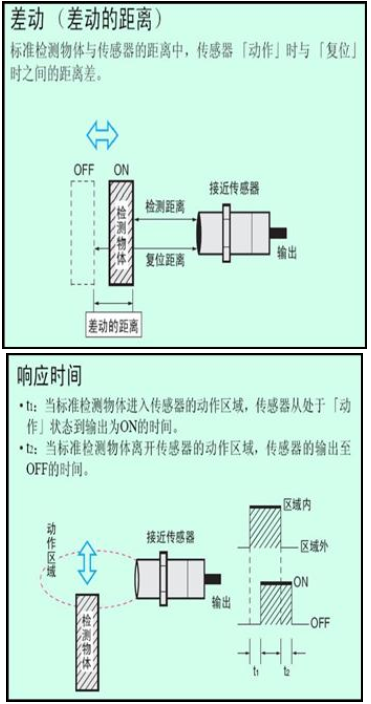
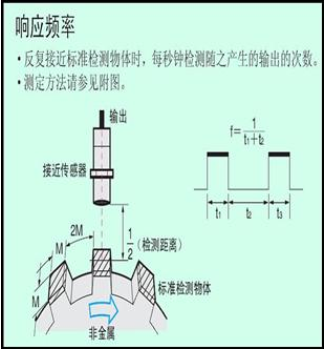
接近传感器术语
接近传感器注意事项
1.检测物体的大小、材料与检测距离的关系
a.物体的大小小于标准检测物体时,检测距离变小。
b.对于同等大小的物体来说,依材料不同而不同。铁的检测距离最长。
c.铝、黄铜等非磁性金属的检测距离较小。
2.检测物体的厚度与检测距离的关系
a.一般检测物体以1mm为准。
b.磁性金属(铁、镍等)的厚度请大于1mm。
c.非磁性金属厚度如果小于0.01mm ,可得到与磁性体同等的检测离—表皮效应。
d.此外,对蒸膜等极薄材料 及无导电性物体也无法检测。
3.相互干扰
接近传感器以高频率振动。相邻设置的话会引起相互干扰、相邻使用不同频率的传感器可以防止相互干扰。
4.电源复位时间/电源OFF时(传感器电源先通后断)
传感器在电源接通后100ms以内即处于可检测状态,将负载与传感器连接在不同电源时,请务必先接通传感器电源。
因为电源OFF时会发生输出脉冲,需设计成让负载或负载线路的电源先行OFF。
5.传感器导线颜色(几乎所有传感器通用)
电源:褐(+)蓝(——) 交流两线也是褐/蓝
控制输出:输出1 — 黑 输出2 — 橙 特殊功能 — 粉
6.传感器动作指示灯颜色
日本美国的标准为红色。欧洲为橙色,所以IEC使用橙色,现欧姆龙的产品多为红色。









 浙公网安备33010502006705号
浙公网安备33010502006705号